
موتور القایی چگونه کار میکند؟

اصول عملکرد موتور القایی
موتور القایی، همانگونه که از نامش بر میآید، بر اساس القای الکترومغناطیسی کار میکند. القای الکترومغناطیسی پدیدهای است که در آن، وقتی یک هادی الکتریکی در یک میدان مغناطیسی گردان قرار میگیرد، نیروی محرکه الکتریکی در آن القا میشود.
استاتور و روتور دو بخش اصلی موتور هستند. استاتور بخش ساکن است و سیمپیچیهایی روی آن سوار شده است. سیمپیچیهای اصلی یا میدان نیز روی روتور قرار گرفتهاند. سیمپیچیهای استاتور با فاصله برابر 120 درجهای از یکدیگر قرار داده شدهاند.
موتور القایی، یک موتور تحریک یگانه یا تکی است؛ بدین معنی که منبع تغذیه تنها به یک بخش آن، یعنی استاتور، اعمال میشود. عبارت تحریک به معنی فرایند القای میدان مغناطیسی در بخشهای مختلف موتور است.
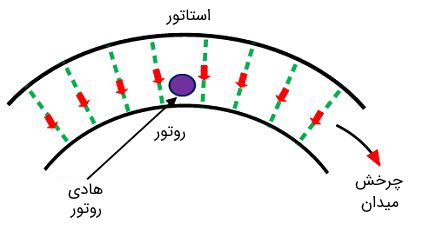
وقتی که منبع سه فاز به استاتور اعمال شود، موجب تولید یک میدان مغناطیسی گردان روی آن خواهد شد. شکل زیر، نحوه ایجاد میدان مغناطیسی گردان در استاتور را نشان میدهد.

میدان مغناطیسی گردان در خلاف جهت عقربههای ساعت میچرخد و پلاریته آن متحرک است. در واقع، پلاریتههای میدان مغناطیسی با توجه به نیم سیکلهای مثبت و منفی منبع تغییر میکنند. تغییر پلاریتهها سبب چرخش میدان مغناطیسی میشود.
هادیهای روتور ثابت هستند. این هادیهای ثابت، میدان مغناطیسی چرخان استاتور را قطع میکنند و به دلیل القای الکترومغناطیسی، نیرو محرکه الکتریکی یا EMF در روتور القا میشود. این EMF به عنوان EMF القایی روتور شناخته میشود و دلیل آن نیز پدیده القای الکترومغناطیسی است.
مدار هادیهای روتور، توسط حلقههای انتهایی یا با کمک مقاومت خارجی بسته میشود. حرکت نسبی بین میدان مغناطیسی گردان و هادی روتور، جریانی را در هادیهای روتور القا میکند. به محض آنکه جریان در روتور برقرار شود، شار در آن القا میشود. جهت شار روتور مشابه با جهت جریان آن است.
اکنون دو شار داریم: یکی ناشی از روتور و دیگری استاتور. این شارها با هم فعل و انفعال دارند. در یک سر هادی شارها یکدیگر را حذف میکنند و در سر دیگر، چگالی شار بسیار بالا است. شار با چگالی بالا سعی میکند هادی روتور را به سمت ناحیهای که چگالی شار آن کم است حرکت دهد. این پدیده، سبب ایجاد گشتاور در هادی شده که به عنوان گشتاور الکترومغناطیسی شناخته میشود.
جهت گشتاور الکترومغناطیسی و میدان مغناطیسی گردان یکسان است. بنابراین، روتور در همان جهت چرخش میدان مغناطیسی گردان شروع به چرخیدن میکند.
سرعت روتور همیشه کمتر از سرعت میدان مغناطیسی چرخان (که با نام سرعت سنکرون شناخته میشود) است. روتور تلاش میکند در سرعت سنکرون بچرخد، اما همواره اصطلاحاً یک لغزش وجود دارد. بنابراین، روتور هیچگاه در سرعت سنکرون نمیچرخد. به همین دلیل است که موتور القایی را موتور آسنکرون (غیرسنکرون) نیز مینامند.
چرا روتور هیچگاه در سرعت سنکرون کار نمیکند؟
اگر سرعت روتور برابر با سرعت سنکرون باشد، حرکت نسبی بین میدان مغناطیسی گردان استاتور و هادیهای روتور وجود نخواهد داشت. بنابراین، EMF در هادی القا نمیشود و جریان آن صفر خواهد شد. بدون برقراری جریان، گشتاوری نیز تولید نمیشود.
به دلایلی که گفته شد، روتور هیچگاه در سرعت سنکرون نمیچرخد و سرعت آن همواره کمتر از میدان مغناطیسی گردان است. علاوه بر مواردی که گفته شد، اصول عملکرد موتور القایی را به صورت زیر نیز میتوان بیان کرد.
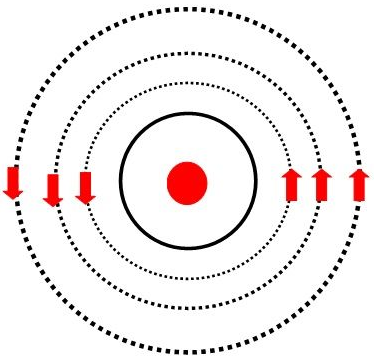
یک هادی تکی را در روتوری که ساکن است در نظر بگیرید. این هادی، میدان مغناطیسی گردان استاتور را قطع میکند. فرض کنید میدان مغناطیسی گردان در جهت عقربههای ساعت میچرخد. در این صورت، طبق قانون القای الکترومغناطیس فارادی، نیروی محرکه الکتریکی در هادی القا میشود.
اگر مدار با یک مقاومت خارجی یا یک حلقه انتهایی بسته شود، نیروی محرکه الکتریکی در روتور القا میشود که سبب عبور جریان در مدار خواهد شد. جهت جریانی که روتور القا میکند در خلاف جهت چرخش میدان مغناطیسی چرخان است. جریان روتور شاری را در آن القا میکند که جهتش مشابه با جهت جریان است.
فعل و انفعالات بین شارهای روتور و استاتور نیرویی ایجاد میکند که بر هادیهای روتور عمل میکند. این نیرو عمود بر روتور است و بنابراین، سبب ایجاد گشتاور میشود. گشتاور، هادیهای روتور را به حرکت در میآورد و در نتیجه روتور در جهت چرخش میدان مغناطیسی گردان شروع به حرکت میکند. روتور بدون هیچگونه سیستم تحریک خارجی میچرخد و به همین دلیل این موتور، موتور خود راهانداز نامیده میشود.
عملکرد موتور به ولتاژ القایی در روتور بستگی دارد و به همین دلیل است که موتور القایی نامیده میشود.

 سری A
سری A سری E
سری E